ربات صنعتی پوما
پوما (به انگلیسی: PUMA)[1]، که در فارسی بدان بازوی رباتیک مفصلی نیز گفته میشود، بازویی صنعتی است که دارای ساختار RRR (یعنی سه مفصل از نوع لولایی دَوَرانی) بوده و محورهای مفاصل دوم و سوم با هم موازی باشند و آن دو بر محور مفصل اول عمود باشند. این ساختار شکلی شبیه به دست انسان را به آن میدهد. پوما دارای کاربردهای وسیعی در صنعت (مثل مونتاژ، بستهبندی، جوشکاری و غیره) است و امروزه توسط بسیاری از شرکتهای رباتسازی جهان تولید میشود.
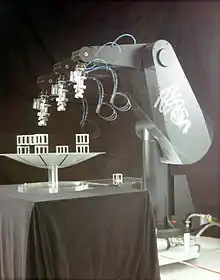
بازوی رباتیک مفصلی در ناسا
جستارهای وابسته
پانویس
منابع
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.