پلیمر الکترواکتیو
پلیمرهای الکترواکتیو (به انگلیسی: ElectroActive polymers)، یا EAPها، پلیمرهایی هستند که هنگام تحریک توسط یک میدان الکتریکی، تغییر اندازه یا شکل را نشان میدهند. متداولترین کاربردهای این نوع مواد در عملگر مکانیکی[1] و سنسورها است.[2][3] یکی از ویژگیهای بارز EAP این است که آنها در حالیکه نیروهای زیادی را تحمل میکنند، دچار تغییر شکل زیادی میشوند. اکثر عملگرهای مکانیکی در گذشته از مواد پیزوالکتریک سرامیکی ساخته شدهاند. در حالی که این مواد قادر به مقاومت در برابر نیروهای بزرگ هستند، اما معمولاً فقط کسری از درصد را تغییر میدهند. در اواخر دهه ۱۹۹۰، نشان داده شدهاست که بعضی از EAPها میتوانند تا ۳۸۰٪ کرنش از خود نشان دهند، که این بسیار بیشتر از سایر عملگرهای مکانیکی سرامیکی است.[1] یکی از رایجترین کاربردهای EAP در زمینه رباتیک در توسعه ماهیچههای مصنوعی است؛ بنابراین، اغلب از یک پلیمرالکترواکتیو به عنوان یک ماهیچه مصنوعی یاد میشود.

تاریخچه
زمینه EAPs در سال ۱۸۸۰ پدیدار شد، هنگامی که ویلهلم رونتگن آزمایشی را طراحی کرد که در آن وی تأثیر میدان الکترواستاتیک را بر روی خواص مکانیکی یک نوار از لاستیک طبیعی آزمایش کرد.[4] نوار لاستیکی در یک انتها ثابت بوده و در طرف دیگر به یک توده وصل شدهاست سپس بارهای الکتریکی روی لاستیک پاشیده شدند و مشاهده شد که طول تغییر کردهاست. در سال ۱۹۲۵ بود که اولین پلیمر پیزوالکتریک کشف شد (الکترلت-Electret). الکترلت با ترکیب موم کارنابا، گلاب و موم زنبورعسل تشکیل شده و سپس در حالی که تحت اعمال جریان الکتریکی مستقیم DC قرار دارد محلول خنک میشود. این مخلوط سپس به یک ماده پلیمری که اثر پیزوالکتریک دارد، جامد میشود.
پلیمرهایی که به شرایط محیطی پاسخ میدهند، غیر از جریان الکتریکی اعمالی، نیز بخش بزرگی از این حوزه مطالعه بودهاست. در سال ۱۹۴۹، کاتچالسکی و همکارانش نشان دادند که وقتی رشتههای کلاژن در محلولهای اسید یا قلیایی فرومیروند، آنها با تغییر در حجم پاسخ میدهند.[5] رشتههای کلاژن در یک محلول اسیدی انبساط یافته و در یک محلول قلیایی منقبض میشوند. اگرچه محرکهای دیگری (مانند pH) مورد بررسی قرار گرفتهاست، به دلیل سهولت و عملی بودن آن، بیشتر تحقیقات به ساخت پلیمرهایی که به منظور تقلید از سیستمهای بیولوژیکی به محرکهای الکتریکی پاسخ میدهند اختصاص داده شدهاست. موفقیت بزرگ بعدی در EAPs در اواخر دهه ۱۹۶۰ رخ داد. در سال ۱۹۶۹ کاوای نشان داد که پلی وینیلیدن فلورید (PVDF) اثر پیزوالکتریک بزرگی را به نمایش میگذارد.[5] این علاقه تحقیق به توسعه سیستمهای دیگر پلیمرها که اثر مشابهی را نشان میدهند، دامن زد. در سال ۱۹۷۷ اولین پلیمرهای رسانا توسط هیدکی شیریکاوا و همکارانش کشف شد.[6] شیریکاوا به همراه آلن مک دیرمید و آلن هیگر نشان دادند که پلی استیلن از نظر الکتریکی رسانا است و با دوپینگ آن با بخار ید، میتوانند هدایت آن را با ۸ مرتبه از شدت افزایش دهند؛ بنابراین رسانایی نزدیک به فلز بود. در اواخر دهه ۱۹۸۰ تعدادی از پلیمرهای دیگر نشان دادند که اثر پیزوالکتریک دارند یا رسانا شدهاند. در اوایل دهه ۱۹۹۰، کامپوزیتهای پلیمری فلزی یونی (IPMC) توسعه داده شدند و نشان دادند که دارای خواص الکتروشیمیایی به مراتب برتر از EAPهای قبلی هستند. مهمترین مزیت IPMC این بود که آنها قادر به فعالسازی (تغییر شکل) در ولتاژهای کم ۱ یا ۲ ولت بودند.[5] این دستورات قدر کمتر از هر EAP قبلی است. نه تنها انرژی فعالسازی برای این مواد بسیار پایینتر بود بلکه آنها نیز میتوانند دچار تغییر شکل بسیار بزرگتری شوند. IPMC نشان داد که در هر نقطه تا ۳۸۰٪ کرنش، با بزرگی، بزرگتر از EAPهای قبلی توسعه یافته به نمایش بگذارند.[1] در سال ۱۹۹۹، یوسف بار کوهن پیشنهاد بازی مچ اندازی از بازوی رباتیک EAP علیه چالش انسانی را ارائه داد.[5] این چالشی بود که طی آن گروههای تحقیقاتی در سراسر جهان برای طراحی بازوی روباتی متشکل از عضلات EAP که میتوانست یک انسان را در یک مسابقه مچاندازی شکست دهد، رقابت کردند. اولین چالش در کنفرانس فعالان و ابزارهای الکترومغناطیسی پلیمر در سال ۲۰۰۵ برگزار شد.[5] نقطه عطف اصلی دیگر در این زمینه این است که اولین وسیله تجاری توسعه یافته شامل EAPs به عنوان عضله مصنوعی در سال ۲۰۰۲ توسط Eamex در ژاپن تولید شد.[1] این وسیله یک ماهی بود که قادر به شنا کردن به تنهایی بود و دُم خود را با استفاده از عضله EAP حرکت میداد. اما توسعه در پیشرفت عملی رضایت بخش نبودهاست.[7] تحقیقات تأمین شده توسط دارپا (آژانس پروژههای تحقیقاتی پیشرفته دفاعی) در دهه ۱۹۹۰ در اسآرآی اینترنشنال و به رهبری ران پلراین با استفاده از پلیمرهای سیلیکون و اکریلیک، پلیمرالکتروواکتیو را ساخت. این فناوری در سال ۲۰۰۳ به شرکت Artificial Muscle وارد شد و تولید صنعتی در سال ۲۰۰۸ آغاز شد.[8] در سال ۲۰۱۰، ماهیچه مصنوعی به عنوان یک شرکت تابعه کووسترو درآمد.[9]
دستهبندی
EAP میتواند چندین دستهبندی داشته باشد، اما بطور کلی به دو دسته اصلی تقسیم میشود:
دی الکتریک
EAPهای دیالکتریک، موادی هستند که با استفاده از نیروهای الکترواستاتیک بین دو الکترود که پلیمر را فشرده میکنند، تحریک ایجاد میشود. الاستومرهای دیالکتریک قادر به ایجاد فشارهای بسیار بالا هستند و اساساً خازنی هستند که هنگام اعمال ولتاژ اجازه میدهند تا پلیمر به ضخامت فشرده شود و به دلیل میدان الکتریکی در ناحیه گسترش یابد. این نوع EAPها بهطور معمول برای تولید میدانهای الکتریکی بالا (صدها تا هزاران ولت) به ولتاژ فعالسازی زیادی نیاز دارد، اما مصرف برق بسیار کمی دارد. EAPهای دیالکتریک نیازی به نیرویی ندارند که محرک را در یک موقعیت معین نگهدارند. نمونههای پلیمرهای برقی و الاستومرهای دیالکتریک هستند.
پلیمرهای فروالکتریک
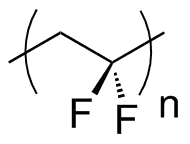
پلیمرهای فروالکتریک گروهی از پلیمرهای قطبی کریستالی هستند که همچنین فروالکتریک هستند، به این معنی که آنها یک قطبش الکتریکی دائمی را حفظ میکنند که میتواند در یک میدان الکتریکی خارجی معکوس یا عوض شود.[10][11] پلیمرهای فروالکتریک، مانند پلیوینیلیدین فلورید (PVDF) (شکل ۱) به دلیل پاسخ ذاتی پیزوالکتریک و همچنین به عنوان سنسورهای گرما به دلیل پاسخ ذاتی پیروالکتریک در مبدلهای صوتی و محرکهای الکترومکانیکی مورد استفاده قرار میگیرند.[12]
پلیمرهای پیوند الکتریکی
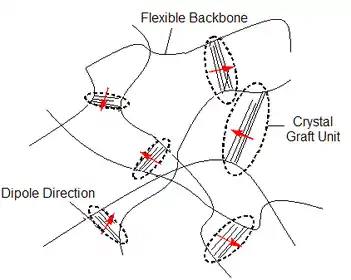
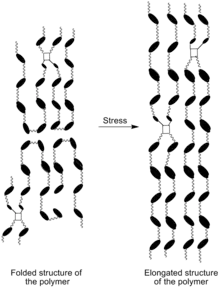
پلیمرهای پیوند الکتریکی دارای زنجیره ستون فقرات قابل انعطاف با زنجیرههای جانبی انشعاب هستند. زنجیرههای جانبی روی پلیمرهای ستون فقرات همسایه متصل میشوند و واحدهای کریستالی را تشکیل میدهند. واحدهای کریستالی ستون فقرات و زنجیره جانبی میتوانند مونومرهای قطبی شده را تشکیل دهند، که دارای اتمهایی با بارهای جزئی و ایجاد لحظههای قطبی هستند، که در شکل ۲ نشان داده شدهاست.[13] هنگامی که یک میدان الکتریکی اعمال میشود، بر روی هر بار جزئی نیرویی اعمال میشود و باعث چرخش کل واحد پلیمر میشود. این چرخش باعث ایجاد فشار الکتریکی و تغییر شکل پلیمر میشود.
پلیمرهای بلوری مایع
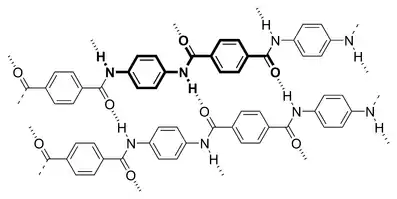
پلیمرهای بلوری مایع زنجیره اصلی دارای گروههای مزوژنیک هستند که توسط یک فضای انعطافپذیر به یکدیگر متصل میشوند که در شکل ۳ نشان داده شدهاند. مزوژن درون ستون فقرات ساختار مزوفاز را تشکیل میدهد و باعث میشود خود پلیمر یک ترکیب سازگار با ساختار مزوفاز را اتخاذ کند. اتصال مستقیم منظم کریستالی مایع با ترکیب پلیمر باعث ایجاد علاقه زیادی به الاستومرهای بلوری مایع با زنجیره اصلی شدهاست.[14] سنتز الاستومرهای بسیار گرویده منجر به تحریک حرارتی کرنش بزرگ در طول جهت زنجیره پلیمر با تغییر دما و در نتیجه خواص مکانیکی منحصر به فرد و کاربردهای بالقوه به عنوان محرک مکانیکی میشود.
یونی
{{درشت|EAPهای یونی، که در آنها تحریک، ناشی از جابجایی یونها در داخل پلیمر است. فقط چند ولت برای فعالسازی مورد نیاز است، اما جریان یونی به معنای قدرت الکتریکی بالاتری است که برای تحریک لازم است و انرژی لازم برای نگه داشتن محرک در یک موقعیت معین است. نمونههایی از EAPS یونی شامل پلیمرهای رسانا، کامپوزیتهای پلیمری فلزی یونی (IPMC) و ژلهای پاسخگو هستند. نمونه دیگر یک محرک ژل باکی است، که یک لایه پلیمر با پشتیبانی از پلی الکترولیت است که از یک مایع یونی ساخته شده بین دو لایه الکترود متشکل از یک ژل مایع یونی تشکیل شده از نانولولههای کربنی تک دیواره تشکیل شدهاست.[15] این نام از شباهت ژل به کاغذ حاصل میشود که میتواند با فیلتر کردن نانولولههای کربن، به اصطلاح باکتری، ساخته شود.[16]
مایع الکترورئولوژیک
مایعات الکترورئولوژیکی ویسکوزیته یک محلول را با استفاده از یک میدان الکتریکی تغییر میدهند. مایع معلق پلیمرها در یک مایع با قطر کم الکتریکی است.[17] با استفاده از یک میدان الکتریکی بزرگ، ویسکوزیته سیستم تعلیق افزایش مییابد. کاربردهای بالقوه این مایعات شامل کمک فنر، مجهز به موتور و میراگرهای صوتی است.[17]
کامپوزیت فلزی یونی پلیمری
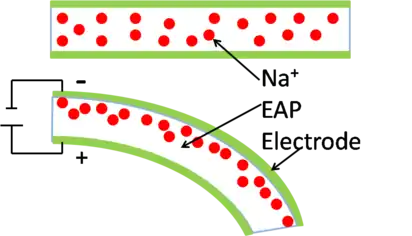
کامپوزیتهای پلیمری فلزی یونی از یک غشای یونومریک نازک با الکترودهای فلزی نجیب بر روی سطح آن تشکیل شدهاست. همچنین این کاتیونها برای تعادل بار آنیونهای ثابت شده در ستون فقرات پلیمر وجود دارد.[18] آنها محرکهای بسیار فعالی هستند که تغییر شکل بسیار بالایی را در ولتاژ کم مصرف نشان میدهند و مقاومت کمتری را نشان میدهند. کامپوزیتهای پلیمری فلزی یونی از طریق جذب الکترواستاتیک بین یونهای ضد کاتیونی و کاتد میدان الکتریکی کاربردی کار میکنند، نمایش شماتیک در شکل ۴ نشان داده شدهاست. این نوع پلیمرها بیشترین وعده را برای استفادههای بیومتریک نشان میدهند زیرا فیبرهای کلاژن اساساً از پلیمرهای یونی با بار طبیعی تشکیل شدهاند.[19] Nafion و Flemion معمولاً کامپوزیتهای فلزی پلیمر یونی هستند.[20]
ژلهای تحریک کننده
ژلهای تحریک کننده (هیدروژلها، هنگامیکه ماده تورم محلول آبی است) نوع خاصی از شبکههای پلیمری قابل تورم با رفتار انتقال فاز حجم هستند. این مواد با تغییرات بسیار ناچیز از محرکهای جسمی خاص (مانند میدان الکتریکی، نور، دما) یا مواد شیمیایی (غلظت)، به میزان قابل توجهی حجم، نوری، مکانیکی و سایر خصوصیات آنها را تغییر میدهند.[21] تغییر حجم این مواد با تورم کوچک شدن اتفاق میافتد و مبتنی بر انتشار است. ژلها بزرگترین تغییر در حجم مواد جامد را فراهم میکنند.[22] همراه با سازگاری عالی با فناوریهای ساخت میکرو، به خصوص هیدروژلهای پاسخگو به محرک از نظر میکروسیستمها با سنسورها و محرکها علاقه فزایندهای دارند. زمینههای کنونی تحقیق و کاربرد سیستمهای حسگر شیمیایی، ریزگردها و سیستمهای تصویربرداری چند حالته است.
مقایسه EAPهای دیالکتریک و یونی
پلیمرهای دیالکتریک قادر به جابجایی القایی خود در حالیکه تحت ولتاژ DC فعال هستند، نگه میدارند.[23] این اجازه میدهد تا پلیمرهای دیالکتریک برای کاربردهای روباتیک در نظر گرفته شوند. این نوع مواد از چگالی انرژی مکانیکی بالایی نیز برخوردار هستند و بدون کاهش عمده عملکرد میتوان در هوا کار کرد. با این حال، پلیمرهای دیالکتریک نیاز به زمینههای فعالسازی بسیار زیاد دارند (> ۱۰ ولت بر میکرومتر) که نزدیک به سطح خرابی هستند. از طرف دیگر فعال سازی پلیمرهای یونی تنها به ۱–۲ ولت نیاز دارد. با این حال، آنها باید رطوبت خود را حفظ کنند، اگرچه برخی از پلیمرها به عنوان فعال کنندههای محصور شده ساخته شدهاند که امکان استفاده از آنها در محیطهای خشک را فراهم میکند.[19] پلیمرهای یونی همچنین یک جفت الکترومکانیکی کم دارند. آنها با این حال برای دستگاههای بیومتریک ایدهآل هستند.
مشخصات
در حالیکه روشهای مختلفی وجود دارد که میتوان پلیمرهای برقی را توصیف کرد، در اینجا فقط سه مورد، مورد بررسی قرار میگیرند: منحنی تنش- کرنش، تحلیل حرارتی مکانیکی پویا و آنالیز حرارتی دیالکتریک.
منحنی تنش-کرنش
منحنی تنش-کرنش اطلاعاتی در مورد خواص مکانیکی پلیمر مانند شکنندگی، کشش و استحکام عملکرد پلیمر ارائه میدهد. این کار با تهیه نیرویی به پلیمر با سرعت یکنواخت و اندازهگیری تغییر شکل حاصل از آن انجام میشود.[24] نمونهای از این تغییر شکل در شکل ۵ نشان داده شدهاست. این روش برای تعیین نوع مواد (شکننده، سفت و غیره) مفید است، اما این یک تکنیک مخرب است زیرا تنش تا زمان شکستگی پلیمر افزایش مییابد.
تجزیه و تحلیل حرارتی مکانیکی (DMTA)>
هر دو تجزیه و تحلیل مکانیکی یک روش غیرمخرب است که برای درک مکانیسم تغییر شکل در یک سطح مولکولی مفید است. در DMTA تنش سینوسی روی پلیمر اعمال میشود و بر اساس تغییر شکل پلیمر، مدول الاستیک و ویژگیهای میرایی بدست میآید (با فرض اینکه پلیمر نوسان ساز هارمونیکی مرطوب است).[24] مواد الاستیک انرژی مکانیکی تنش را گرفته و آن را به انرژی بالقوه ای تبدیل میکنند که بعداً بازیابی میشود. چشمه ایدهآل از تمام انرژی بالقوه برای بازیابی شکل اصلی خود استفاده میکند (بدون میرایی)، در حالیکه یک مایع از تمام انرژی بالقوه برای جریان استفاده میکند، هرگز به موقعیت یا شکل اصلی خود (میرایی بالا) بازنگردد. یک پلیمر ویسکوئلاستیک ترکیبی از هر دو نوع رفتار را به نمایش میگذارد.[24]
آنالیز حرارتی دی الکتریک (DETA)
DETA مشابه DMTA است، اما به جای نیروی مکانیکی متناوب، یک میدان الکتریکی متناوب اعمال میشود. زمینه کاربردی میتواند منجر به قطبی شدن نمونه شود و اگر پلیمر حاوی گروههایی باشد که قطرهای دائمی دارند (مانند شکل ۲)، آنها با میدان الکتریکی تراز خواهند شد.[24] تراکم پذیری را میتوان از تغییر در دامنه اندازهگیری کرد و به اجزای ذخیرهسازی دیالکتریک و از بین رفت. میدان جابجایی الکتریکی را نیز میتوان با دنبال کردن جریان اندازهگیری کرد.[24] پس از برداشتن این زمینه، دوقطبیها به یک جهت تصادفی برمیگردند.
کاربردها
به دلیل سهولت در پردازش بسیاری از مواد پلیمری، مواد EAP به راحتی در اشکال مختلفی ساخته میشوند و از این رو مواد بسیار متنوع را ایجاد میکنند. یکی از کاربردهای بالقوه برای EAP این است که بهطور بالقوه میتوانند در سیستمهای میکروالکترومکانیکی (MEMS) برای تولید محرکهای هوشمند ادغام شوند.
ماهیچه مصنوعی
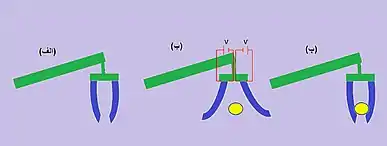
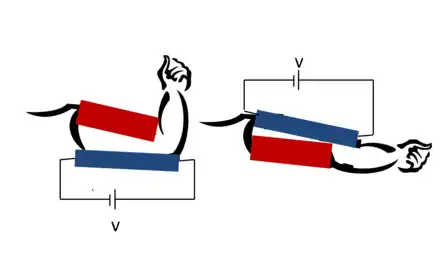
به عنوان آیندهنگرترین جهت تحقیقات عملی، EAP در ماهیچههای مصنوعی استفاده میشود که نمونهای از آن در شکل ۶ نشان داده شدهاست.[25] توانایی آنها در تقلید از عملکرد عضلات بیولوژیکی با ضخامت بالای شکستگی، فشار زیاد تحریک و لرزش ذاتی توجه دانشمندان در این زمینه را به خود جلب میکند.[5]
صفحه نمایش لمسی
در سالهای اخیر، «پلیمرهای الکترواکتیو برای نمایشگرهای بریل تجدیدپذیر»[26] برای کمک به بینایی افراد در خواندن سریع و ارتباطات رایانهای ظاهر شدهاست. این مفهوم مبتنی بر استفاده از یک محرک EAP است که به صورت آرایه تنظیم شدهاست. ردیفهای الکترود در یک طرف از فیلم EAP و ستونها در طرف دیگر عناصر فردی را در آرایه فعال میکنند. هر عنصر با یک نقطه بریل سوار میشود و با اعمال ولتاژ در ضخامت عنصر انتخاب شده پایین میآید و باعث کاهش ضخامت موضعی میشود. تحت کنترل رایانه، نقاط به وجود میآیند تا الگوهای لمسی از اوجها و پایینها را نشان دهند و اطلاعاتی را که باید خوانده شوند نشان دهند.
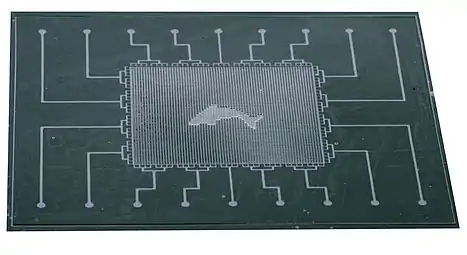
برداشتهای بصری و لمسی از یک سطح مجازی توسط یک صفحه نمایش لمسی با وضوح بالا، به اصطلاح «پوست مصنوعی» نمایش داده میشود (شکل ۷).[27] این دستگاههایی یکپارچه از مجموعهای از هزاران تعدیل کننده چند حالته (پیکسل محرک) مبتنی بر هیدروژلهای پاسخگو محرک تشکیل شدهاست. هر تعدیلکننده قادر است بهطور جداگانه انتقال، ارتفاع و نرمی خود را تغییر دهد. علاوه بر این ممکن است استفاده از آنها به عنوان نمایشگرهای گرافیکی برای نمایشگرهای دارای دید بینایی مانند کلیدهای قابل برنامهریزی رایگان از تاچ پد و کنسول جالب توجه باشد.
ریزگردها
مواد EAP پتانسیل عظیمی برای ریزگردها به عنوان سیستمهای انتقال دارو، دستگاههای میکروسیالی و تراشه آزمایشگاهی را دارند. اولین فناوری پلتفرم میکروسیالی که در ادبیات گزارش شدهاست، مبتنی بر ژلهای محرک است. برای جلوگیری از الکترولیز دستگاههای میکروفیلوئیدی مبتنی بر هیدروژل آب، عمدتاً بر پایه پلیمرهای پاسخگو به دما با خصوصیات دمای محلول بحرانی پایین (LCST) قرار دارند که توسط یک رابط الکتروترمیک کنترل میشوند. دو نوع ریزپردازنده، یک میکروپمپ انتشار و یک میکروپمپ جابجایی شناخته شدهاست.[28] ریزگردها مبتنی بر هیدروژلهای پاسخگو به محرک برخی از خواص مفید مانند تحمل ذرات، عدم نشت و مقاومت در برابر فشار برجسته را نشان میدهند.[29][30][31] علاوه بر این مؤلفههای استاندارد ریزپلوئیدی، پلتفرم هیدروژل همچنین سنسورهای شیمیایی[32] و کلاس جدیدی از اجزای میکرو فلوئیدی، ترانزیستورهای شیمیایی (همچنین به عنوان دریچههای چوستوست) نیز ارائه میدهد.[33] در صورت دستیابی به غلظت آستانه مواد شیمیایی خاص، این دستگاهها جریان مایعات را تنظیم میکنند. ترانزیستورهای شیمیایی اساس مدارهای یکپارچه سیال میکروشیمیایی مکانیکی را تشکیل میدهند. فرایند «شناسههای شیمیایی» منحصراً اطلاعات شیمیایی، از انرژی خود تغذیه میشوند، به صورت اتوماتیک عمل میکنند و قادر به ادغام در مقیاس بزرگ هستند.[34]
یک سکوی دیگر میکروفلوئیدی بر اساس مواد یونومریک است. پمپهای ساخته شده از آن ماده میتوانند عملکرد ولتاژ (باتری) کم، امضای نویز بسیار کم، راندمان بالای سیستم و کنترل دقیق سرعت جریان را ارائه دهند.[35] فناوری دیگری که میتواند از خواص بی نظیر محرکهای EAP بهره ببرد غشاهای نوری است. به دلیل مدول کم، مقاومت در برابر مکانیکی محرکها، با مواد غشای نوری معمولی مطابقت دارند. همچنین یک محرک EAP منفرد قادر به ایجاد جابجاییهایی است که از میکرومتر تا سانتیمتر متغیر است. به همین دلیل میتوان از این مواد برای تصحیح استاتیک شکل و سرکوب لرزش استفاده کرد. این محرکها همچنین میتوانند برای اصلاح ناهنجاریهای نوری به دلیل تداخل جوی مورد استفاده قرار گیرند.[36]
از آنجاییکه این مواد از ویژگیهای الکتریکی بسیار خوبی برخوردار هستند، مواد EAP پتانسیلهایی در تحقیقات رباتهای بیومتریک، سنسورهای تنش و زمینه آکوستیک نشان میدهند، که باعث میشود EAPها در آینده نزدیک تبدیل به یک موضوع تحقیق جذاب شوند. از آنها برای محرکهای مختلفی مانند عضلات صورت و عضلات بازو در روباتهای انساننما استفاده شدهاست.[37]
چشمانداز
زمینه EAPs به اندازه کافی گسترش نیافته، که چندین موضوع را باقی میگذارد که هنوز هم باید روی آنها کار شود.[5] عملکرد و پایداری طولانی مدت EAP باید با طراحی یک سطح غیرقابل نفوذ در آب بهبود یابد. این امر باعث جلوگیری از تبخیر آب موجود در EAP میشود و همچنین باعث کاهش تلفات احتمالی یونهای مثبت در هنگام کار EAP در محیط آبی میشود. هدایت سطح بهبود یافته باید با استفاده از روشهایی مورد بررسی قرار گیرد تا سطح رسانای عاری از نقص ایجاد شود. این ممکن است با استفاده از رسوب بخار فلزی یا سایر روشهای دوپینگ انجام شود. همچنین ممکن است از پلیمرهای رسانا برای تشکیل لایه ضخیم رسانا استفاده شود. مقاومت در برابر حرارت EAP مطلوب خواهد بود که اجازه دهد بدون نیاز به ایجاد ساختار داخلی EAP به دلیل تولید گرما در کامپوزیت EAP، در ولتاژهای بالاتر کار کند. توسعه EAP در تنظیمات مختلف (به عنوان مثال، الیاف و بستههای فیبر)، به منظور افزایش دامنه حالتهای ممکن حرکت مفید خواهد بود.
جستارهای وابسته
منابع
- «"Bar-Cohen, Yoseph: "Artificial Muscles using Electroactive Polymers (EAP): Capabilities, Challenges and Potential" (PDF)» (PDF).
- Wang, Tiesheng; Farajollahi, Meisam; Choi, Yeon Sik; Lin, I-Ting; Marshall, Jean E.; Thompson, Noel M.; Kar-Narayan, Sohini; Madden, John D. W.; Smoukov, Stoyan K. (2016-08-06). "Electroactive polymers for sensing". Interface Focus. 6 (4): 20160026. doi:10.1098/rsfs.2016.0026. ISSN 2042-8898. PMC 4918837. PMID 27499846.
- «Ionic Polymer Metal Composites (IPMCs) Set, Editor: Mohsen Shahinpoor, Royal Society of Chemistry, Cambridge 2016,».
- Keplinger, C.; Kaltenbrunner, M.; Arnold, N.; Bauer, S. (2010-02-19). "Rontgen's electrode-free elastomer actuators without electromechanical pull-in instability". Proceedings of the National Academy of Sciences. 107 (10): 4505–4510. doi:10.1073/pnas.0913461107. ISSN 0027-8424.
- «Electrochemistry Encyclopedia -- Electroactive polymers (EAP)». archive.ph. ۲۰۱۲-۱۲-۱۲. دریافتشده در ۲۰۱۹-۱۲-۲۷.
- "Natural polysaccharides as electroactive polymers". Appl Microbiol Biotechnol. 67 (6): 735–745. 2005. doi:10.1007/s00253-005-1931-4. PMID 15724215.
- Eftekhari, Ali (2010-04-27). "Comment on "A Linear Actuation of Polymeric Nanofibrous Bundle for Artificial Muscles"". Chemistry of Materials. 22 (8): 2689–2690. doi:10.1021/cm903343t. ISSN 0897-4756.
- «Wayback Machine» (PDF). web.archive.org. ۲۰۱۶-۱۲-۰۶. دریافتشده در ۲۰۱۹-۱۲-۲۷.
- Helps, Tim; Taghavi, Majid; Rossiter, Jonathan (2018-03-27). "Towards electroactive gel artificial muscle structures". Electroactive Polymer Actuators and Devices (EAPAD) XX. SPIE. doi:10.1117/12.2323527. ISBN 978-1-5106-1684-4.
- "Ferroelectric Properties of Vinylidene Fluoride Copolymers," by T. Furukawa, in Phase Transitions, Vol. 18, pp. 143-211 (1989).
- "Ferroelectric Polymers von Hari Singh Nalwa | ISBN 978-0-8247-9468-2 | Fachbuch online kaufen - Lehmanns.de". www.lehmanns.de (به آلمانی). Retrieved 2019-12-27.
- Lovinger, A. J. (1983-06-10). "Ferroelectric polymers". Science (New York, N.Y.). 220 (4602): 1115–1121. doi:10.1126/science.220.4602.1115. ISSN 0036-8075. PMID 17818472.
- Wang, Youqi; Sun, Changjie; Zhou, Eric; Su, Ji (2004-12-01). "Deformation mechanisms of electrostrictive graft elastomer". Smart Materials and Structures. 13 (6): 1407–1413. doi:10.1088/0964-1726/13/6/011. ISSN 0964-1726.
- Ishige, Ryohei; Tokita, Masatoshi; Naito, Yu; Zhang, Chun Ying; Watanabe, Junji (January 22, 2008). "Unusual Formation of Smectic A Structure in Cross-Linked Monodomain Elastomer of Main-Chain LC Polyester with 3-Methylpentane Spacer". Macromolecules. 41 (7): 2671–2676. doi:10.1021/ma702686c. ISSN 0024-9297.
- Qu, L.; Peng, Q.; Dai, L.; Spinks, G.M.; Wallace, G.G.; Baughman, R.H. (2008). "Carbon Nanotube Electroactive Polymer Materials: Opportunities and Challenges". MRS Bulletin. 33 (3): 215–224. doi:10.1557/mrs2008.47.ISSN 0883-7694
- Fukushima, Takanori; Asaka, Kinji; Kosaka, Atsuko; Aida, Takuzo (2005-04-15). "Fully Plastic Actuator through Layer-by-Layer Casting with Ionic-Liquid-Based Bucky Gel". Angewandte Chemie International Edition. 44 (16): 2410–2413. doi:10.1002/anie.200462318. ISSN 1433-7851.
- Schulz, Donald N.; Glass, J. Edward, eds. (1991-05-13). "Polymers as Rheology Modifiers". ACS Symposium Series. doi:10.1021/bk-1991-0462. ISSN 1947-5918.
- Electroactive Polymer (EAP) Actuators as Articifial Muscles-Reality, Potential and Challenges.
- Shahinpoor, Mohsen; Bar-Cohen, Yoseph; Xue, T.; Harrison, Joycelyn S.; Smith, Joseph G. (1998-07-20). "Some experimental results on ionic polymer-metal composites (IPMC) as biomimetic sensors and actuators". Smart Structures and Materials 1998: Smart Materials Technologies. SPIE. doi:10.1117/12.316870.
- Park, I.S.; Jung, K.; Kim, D.; Kim, S.M; Kim, K.J. (2008). "Physical Principles of Ionic Polymer–Metal Composites as Electroactive Actuators and Sensors". MRS Bulletin. 33 (3): 190–195. doi:10.1557/mrs2008.44.ISSN 0883-7694
- Chemoresponsive Materials, Editor: Hans-Jörg Schneider, Royal Society of Chemistry, Cambridge 2015, https://pubs.rsc.org/en/content/ebook/978-1-78262-242-0
- Hydrogel Sensors and Actuators.
- Bar-Cohen, Yoseph; Kim, Kwang J; Choi, Hyouk Ryeol; Madden, John D W (2007-04-01). "Electroactive polymer materials". Smart Materials and Structures. 16 (2). doi:10.1088/0964-1726/16/2/E01. ISSN 0964-1726.
- Polymers: Chemistry and Physics of Modern Material.
- Electroactive Polymers for Robotic Applications, Artificial Muscles and Sensors.
- Bar-Cohen, Yoseph (2009). "Electroactive polymers for refreshable Braille displays". SPIE Newsroom. doi:10.1117/2.1200909.1738. ISSN 1818-2259.
- Richter, Andreas; Paschew, Georgi (2009-03-06). "Optoelectrothermic Control of Highly Integrated Polymer-Based MEMS Applied in an Artificial Skin". Advanced Materials. 21 (9): 979–983. doi:10.1002/adma.200802737.
- Richter, Andreas; Klatt, Stephan; Paschew, Georgi; Klenke, Christian (2009). "Micropumps operated by swelling and shrinking of temperature-sensitive hydrogels". Lab Chip. 9 (4): 613–618. doi:10.1039/B810256B. ISSN 1473-0197.
- Richter, A.; Kuckling, D.; Howitz, S.; Gehring, T.; Arndt, K. (2003). "Electronically controllable microvalves based on smart hydrogels: Magnitudes and potential applications". Journal of Microelectromechanical Systems. 12 (5): 748–753. doi:10.1109/JMEMS.2003.817898. ISSN 1057-7157.
- Yu, Cong; Mutlu, Senol; Selvaganapathy, Ponnambalam; Mastrangelo, Carlos H.; Svec, Frantisek; Fréchet, Jean M. J. (2003). "Flow Control Valves for Analytical Microfluidic Chips without Mechanical Parts Based on Thermally Responsive Monolithic Polymers". Analytical Chemistry. 75 (8): 1958–1961. doi:10.1021/ac026455j. ISSN 0003-2700.
- «Hydrogel Micro Valves». بایگانیشده از اصلی در 9 اكتبر 2015. دریافتشده در 1 ژانویه 2020. تاریخ وارد شده در
|archive-date=را بررسی کنید (کمک) - Richter, Andreas; Paschew, Georgi; Klatt, Stephan; Lienig, Jens; Arndt, Karl-Friedrich; Adler, Hans-Jürgen (2008-01-25). "Review on Hydrogel-based pH Sensors and Microsensors". Sensors. 8 (1): 561–581. doi:10.3390/s8010561. ISSN 1424-8220. PMC 3668326. PMID 27879722.
- Richter, A.; Türke, A.; Pich, A. (2007-04-20). "Controlled Double-Sensitivity of Microgels Applied to Electronically Adjustable Chemostats". Advanced Materials. 19 (8): 1109–1112. doi:10.1002/adma.200601989.
- Greiner, Rinaldo; Allerdissen, Merle; Voigt, Andreas; Richter, Andreas (2012). "Fluidic microchemomechanical integrated circuits processing chemical information". Lab on a Chip. 12 (23): 5034. doi:10.1039/c2lc40617a. ISSN 1473-0197.
- Ozsecen, Muzaffer Y.; Mavroidis, Constantinos (2010-03-25). "Nonlinear force control of dielectric electroactive polymer actuators". Electroactive Polymer Actuators and Devices (EAPAD) 2010. SPIE. doi:10.1117/12.847240.
- «Fig. 5. Fragments of interferograms: a - from January 8, 2007– February 28, 2009, b - from January 11, 2008– January 16, 2010, c - from February 26, 2008– March 3, 2010, d - with a one-year interval from June 22, 2015–20.06. 2016». dx.doi.org. دریافتشده در ۲۰۱۹-۱۲-۳۰.
- http://eap.jpl.nasa.gov/ NASA WorldWide Electroactive Polymer Actuators Webhub