چندپروانه
چندپروانه (به انگلیسی: Multirotor) به نوعی از هواگردهای بالگردان گفته میشود که دارای ۳ دکل پروانه یا بیشتر باشد. تعمیر و نگهداری اینگونه هواگردها برای تیم پشتیبانی بسیار سادهتر از بالگردهای معمولی است.


«آرایش هممحور»
در بالگردهای معمولی همانند امدی ۵۰۰، قطعات بسیار زیادی در مجموعهٔ پروانه (ملخ) بهکار میروند و اهرمها و بَستها و لولاهای گوناگون در پروانه اصلی بالگرد نصب میشود.
ولی در هواگردهای چندپروانه، دکل ثابت است و هیچگونه قطعهٔ متحرک ندارد و افزایش و کاهش میزان گشتاور و رانش، تنها با تغییر دادن میزان نیروی الکتریکی ورودی به آن ملخها رخ میدهد. برای نمونه در بالگردهای الکتریکی، تنها با افزایش و کاهش میزان برق ورودی به روتور الکتریکی، نیاز را برای فراز و فرود تأمین میکنند.[1][2][3][4][5][6]


«وولوکاپتر ۲-ایکس»
همچنین کنترل این بالگردها برای خلبانان آسانتر از مدلهای معمولی است. زیرا دیگر نیازی به تغییر زاویهٔ ملخها وجود ندارد و درواقع اهرم کولکتور و پیچ تراتل که بر روی آن اهرم است در هم ادغام شدهاند و درواقع تنها از یک مکانیزم برای برخاستن و فرود آمدن استفاده میشود. یعنی افزایش نیروی موتورها یا بوسیلهٔ چرخاندن پیچ تراتل صورت میگیرد یا بوسیلهٔ بالا و پایین آوردن اهرم کولکتور؛ بنابراین تغییر نیروی رانش تنها دارای یک مکانیزم است که کار را برای خلبان سادهتر میکند. در این بالگردها تغییر جریان الکتریکی است که گشتاور را کم و زیاد میکند.
به دلیل سادگی تعمیر و استفاده از این نوع پروانهها، موارد کاربری زیادی برای آنها ازجمله پهپاد نظامی و غیرنظامی و هواپیماهای اسباب بازی رادیوکنترل وجود دارد. بالگردهای ترایکاپتر (سهپروانه)، کوآدکاپتر (چهار پروانه)، هگزاکاپتر (ششپروانه) وِ اُکتاکاپتر (هشت پروانه) در دستهٔ هواگردهای چندپروانه جای دارند.
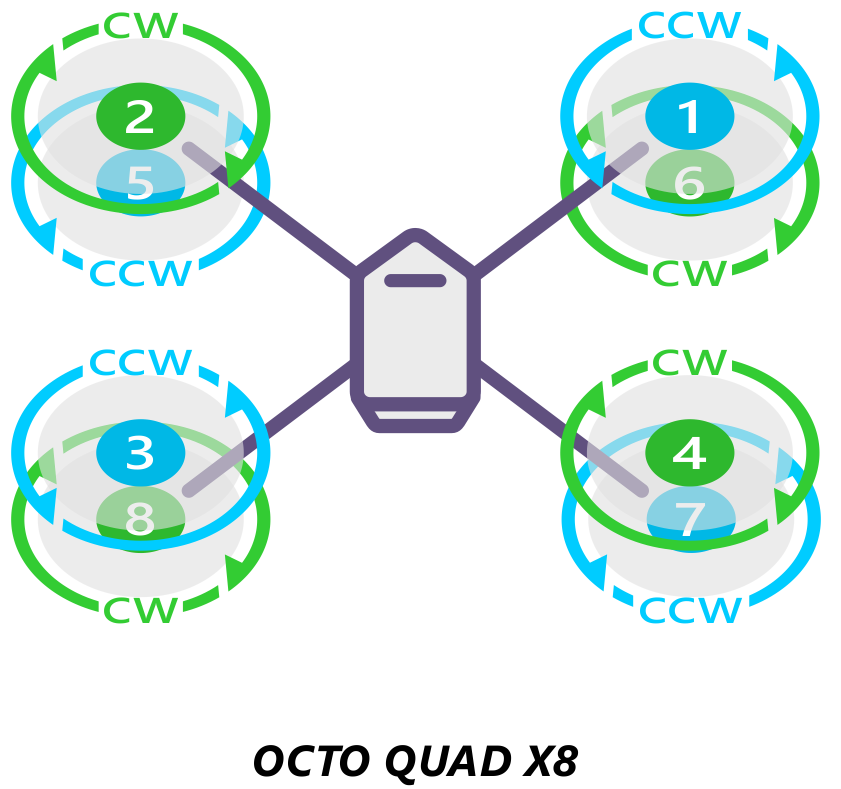
همچنین مدلی به نام «اوکتاکوآد» ساخته شدهاست که به معنای «آرایش هشتچهار» است. این مدل درواقع همانند چهارپروانه است، ولی هر پایهاش پروانهٔ دوطبقه دارد و طبقهٔ زیرین برخلاف طبقه رویی میچرخد و نیروی ضدگشتاور را تأمین میکند؛ و همانند بالگردهای کوآکسیال (پروانه هممحور) عمل مینماید.[7][8]
جستارهای وابسته
منابع
- "AeroQuad - The Open Source Quadcopter". Archived from the original on 2012-01-03. Retrieved 2012-01-05.
- "Multicopter Table". multicopter.org. Retrieved 30 June 2015.
- "FrontPage - UAVP-NG - The Open Source Next Generation Multicopter". uavp.ch. Retrieved 30 June 2015.
- "FrontPage - UAVP-NG - The Open Source Next Generation Multicopter". uavp.ch. Retrieved 30 June 2015.
- "DIY Drones". diydrones.com. Retrieved 30 June 2015.
- OpenPilot بایگانیشده در ۲۰۱۱-۰۵-۲۷ توسط Wayback Machine Open source UAV autopilot for multirotors
- "Octo Quad". ardupilot.org. Retrieved 30 December 2019.
- "Multirotor Frame Configurations". Coptercraft. Retrieved 23 December 2015.
{kind=link}
بالگردها و هواگردهای بالگردان | ||||||
|---|---|---|---|---|---|---|
| بالگردها و هواگردهای بالگردان |
|  | ||||
| خطرها | ||||||
| مقالههای مرتبط | ||||||
| مقالات اصلی |
|  |
|---|---|---|
| انواع |
| |
| طبقهبندیها | ||
| نقل و انتقال | ||
| پژوهش |
| |
| ||