عملگر تکانه زاویهای
در مکانیک کوانتومی، عملگر تکانه زاویهای یکی از عملگرهای متعدد مرتبط است که مشابه به تکانه زاویهای کلاسیک است. عملگر تکانه زاویهای نقشی محوری در نظریهفیزیک اتمی و سایر مسائل کوانتومی مرتبط باتقارن چرخشی بازی میکند. در هر دوی سامانههای کلاسیک و کوانتومی، تکانه زاویهای ( به همراه تکانه خطیو انرژی) یکی از سه ویژگی بنیادی حرکت است.[1]
| مکانیک کوانتوم |
|---|
|
آشنایی واژهنامه · تاریخچه |

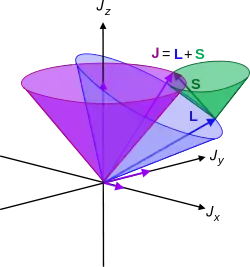
عملگرهای تکانه زاویهای متعددی وجود دارند : تکانه زاویهای کل(J)، تکانه زاویهای مداری(L) و تکانه زاویهای اسپین (که به اختصار به آن اسپین میگویند و با S نشان دادهمیشود) . تکانه زاویهای کل همیشه پایسته است.
تکانههای زاویهای اسپین، مداری و کل
تعریف کلاسیک تکانه زاویهای است. این تعریف را میتوان با در نظر گرفتن تفسیر جدیدی از r به عنوان عملگر مکانکوانتومی و p به عنوان عملگر تکانه، به مکانیک کوانتومی برد. در اینصورت L یک عملگرخواهد بود که بهطور خاص، عملگر تکانه زاویهای مداری نامیده میشود در واقع، L یک عملگر برداری است، یعنی ، که Lx, Ly, Lz سه عملگر متفاوت هستند.


اما نوع دیگری از تکانه زاویهای نیز وجود دارد که تکانه زاویهای اسپین خوانده میشود و اغلب به اختصار به آن اسپین گفته میشود و با علامت عملگر اسپین S نشان داده میشود. تقریباً تمامذرات بنیادی اسپین دارند. اسپین اغلب به این صورت تصویر میشود که یک ذره واقعاً به دور محور خود میچرخد، اما این تنها یک تشبیه است و بر واقعیت منطبق نیست :اسپین یکی از ویژگیهای ذاتی یک ذره است که به هیچ نوع حرکتی در فضا مرتبط نیست. تمام ذرات بنیادی یک اسپین مشخصه دارند، مثلاً برای الکترونها همیشه اسپین ۱/۲ دارند در حالی که اسپین فوتونها همواره ۱ است.
و سرانجام یک تکانه زاویهای کل J هم وجود دارد که تکانههای زاویهای مداری و اسپینی را با هم ترکیب میکند:

قانون پایستگی تکانه زاویهای بیان میکند که J دریک سامانه بسته یا J در کل جهان پایسته میماند. هرچند که L و S بهطور کلی پایسته نیستند. مثلاً برهمکنش اسپین-مدار اجازه میدهد که با ثابت ماندن J، تکانه زاویهای میان S و L انتقال یابد
عمگر تکانه زاویهای مداری
عملگر تکانه راویهای مداری L به زبان ریاضی توسط ضرب برداری یک عملگر مکان تابع موج (r) و عملگر تکانه (p) تعریف میشود:
این شبیه به تعریف تکانه زاویهای در فیزیک کلاسیک است.
در مورد خاص یک تکذره بدون بار الکتریکی و بدون اسپین، عملگر تکانه زاویهای مداری را میتوان بر پایه مکان به صورت یک معادله برداری نوشت :

که ∇ عملگر دیفرانسیل , دل است.
روابط جابجایی
روابط جابجایی میان مولفهها
عملگر تکانه زاویهای یک عملگر برداری است، یعنی میتوان آن را بر حسب مؤلفههای برداری اش بیان کرد. رابطه جابجایی زیر میان مؤلفهها برقرار است:[2]

که [ , ] علامت جابجاگر است

میتوان آنرا بهطور کلی به این صورت نشان داد
- ،

که l, m, n اندیسهای مؤلفهها هستند (1 برای x, 2 برای y, 3 برای z), و εlmn نشاندهنده نماد لویچیتا است.
عبارت فشردهتری به شکل یک معادله برداری نیز امکانپذیر است : [3]

روابط جابهجایی را میتوان به عنوان نتیجه مستقیم روابط جابجایی متعارف ، اثبات نمود که δlm دلتای کرونکر است.

رابطه مشابهی در فیزیک کلاسیک وجود دارد: [4]

که Ln مؤلفهای از عملگر تکانه زاویهای کلاسیک است و کروشه پواسون است.

روابط جابجایی مشابهی نیز در مورد سایر عملگرهای تکانه زاویهای (اسپین و تکانه زاویهای کل) برقرار است:[5]
- .

این روابط جابجایی بدین معنا هستند که L دارای ساختار ریاضی جبر لی است. در این مورد جبر لی (2)SU یا (3)SO، گروه چرخشی در سه بعد است. همین وضعیت در مورد J و S نیز صادق است. این روابط جابجایی در اندازهگیری و عدم قطعیت کاربرد دارند.
روابط برداری شامل اندازه بردار
مانند هر بردار دیگری، اندازه عملگر تکانه زاویهای مداری به شکل زیر تعریف میشود،
- .

L2 یک عملگر کوانتومی دیگر است. با مؤلفههای L جابهجا میشود,

یک راه برای اثبات اینکه این عملگرها جابهجا میشوند این است که از رابطههای جابهجایی [Lℓ, Lm] در بخش قبل استفاده کنیم:
روی[نمایش] در سمت راست کلیک کنید تا اثباتی برای رابطههای جابهجایی [L2, Lx] = 0, sبا شروع از [Lℓ, Lm] [6]




از نظر ریاضی، L2 ناوردای کاسیمیر از جبر لی (so(3 است که توسط L ایجاد میشود.
در موارد کلاسیک، L تکانه زاویهای مداری کلا سامانه ذرات، n بردار واحد در امتداد یکی از محورهای دکارتی است و همچنین شبهجابهجایی براکت پواسون L را با هر یک از مؤلفههای دکارتیاش داریم:[7]

که n یکی از یه مؤلفه دکارتی L است
در مکانیک کوانتومی همان روابط جابهجایی در مورد عملگرهای تکانه زاویهای دیگر (اسپین و تکانه زاویهای کل) نیز برقرار است،

اصل عدم قطعیت
بهطور کلی در مکانیک کوانتومی وقتی دو عملگر مشاهدهپذیر، قابل جابهجایی نباشند به آنها مشاهدهپذیرهای ناسازگار گفته میشود. دو مشاهدهپذیر ناسازگار را نمیتوان همزمان با هم اندازه گرفت؛ بلکه در عوض آنها از اصل عدم قطعیت پیروی میکنند. هرچه یکی از این مشاهدهپذیرها، دقیقتر شناختهشود، دیگری با دقت کمتری قابل شناخت خواهد بود. همانطور که در یک اصل عدم قطعیت، مکان و تکانه به هم مرتبط میشوند، برای تکانه زاویهای نیز اصل عدم قطعیتی وجود دارد.
اصل عدم قطعیت زیر از معادله رابرتسون-شرودینگر حاصل میشود:

که انحراف معیار استاندارد در مقادیر اندازهگیریشده برای X و مقدار چشمداشتی X را نشان میدهد. این نابرابری در صورتی جاهای x,y،z عوض شود، یا L با J یا S جایگزین شود، نیز برقرار است.


بنابراین، دو مؤلفه قطری تکانه زاویهای را نمیتوان همزمان دانست یا اندازهگیری نمود مگر در موارد خاص مانند .

هرچند که میتوان L2 و هریک از مؤلفههای L را بهطور همزمان اندازهگیری یا تعیین نمود؛ مثلاً، L2 و Lz. این اغلب مفید واقع میشود مقادیر آن توسط عدد کوانتومی سمتی وعدد کوانتومی مغناطیسی مشخص میشود.
منابع
- Introductory Quantum Mechanics, Richard L. Liboff, 2nd Edition, ISBN 0-201-54715-5
- Aruldhas, G. (2004-02-01). "formula (8.8)". Quantum Mechanics. p. 171. ISBN 978-81-203-1962-2.
- Shankar, R. (1994). Principles of quantum mechanics (2nd ed.). New York: Kluwer Academic / Plenum. p. 319. ISBN 9780306447907.
- H. Goldstein, C. P. Poole and J. Safko, Classical Mechanics, 3rd Edition, Addison-Wesley 2002, pp. 388 ff.
- Littlejohn, Robert (2011). "Lecture notes on rotations in quantum mechanics" (PDF). Physics 221B Spring 2011. Retrieved 13 Jan 2012. External link in
|work=(help) - Griffiths, David J. (1995). Introduction to Quantum Mechanics. Prentice Hall. p. 146.
- Goldstein et al, p. 410