نظریه کنترل
نظریه کنترل شاخهای میانرشتهای از علوم مهندسی و ریاضیات است که به رفتار سیستمهای دینامیکی دارای ورودی میپردازد. ورودی اعمال شده به یک سامانه، فرمان یا مرجع نامیده میشود. هنگامی که قرار است یک یا چند خروجی سامانه، مرجع خاصی را در بازه زمان دنبال کنند، یک کنترلکننده (جبران ساز افزوده شده به سامانه اولیه)، ورودی سامانه را به گونهای دستکاری میکند تا تغییرات مناسب در خروجی سامانه پدید آیند و رفتار سامانه به رفتار مطلوب کاربر نزدیک و نزدیک تر گردد. معمولاً هدف تئوری کنترل یافتن جوابهای مناسبی برای اجرای جبرانسازی بهینه رفتار سامانه توسط کنترلکننده میباشد، به گونهای که موجب پایداری سامانه و آرامش خروجی یا خروجیهای آن حول یک نقطه کار و عدم نوسان خروجیها حول این نقطه گردد. در بیشتر مواقع، یک دسته معادلات دیفرانسیل رابطه بین ورودیها و خروجیهای یک سامانه را تعریف میکنند. اگر این دسته معادلات، معادلاتی دیفرانسیل خطی با ضرایب ثابت باشند، میتوان با محاسبه تبدیل لاپلاس آنها یک تابع تبدیل که توصیفکننده رابطه بین ورودی و خروجیهای سامانه است، را بدست آورد. اگر دسته معادلات دیفرانسیل غیرخطی باشند ولی جواب معینی داشته باشند میتوان با خطیسازی آنها حول یک نقطه کار و مجدداً محاسبه تبدیل لاپلاس، تابع تبدیل سامانه را بدست آورد. تابع تبدیل که تابع سیستم یا تابع شبکه نیز نامیده میشود، توصیف ریاضی رابطه بین ورودی و خروجی یک جواب خطی تغییرناپذیر با زمان دسته معادلات دیفرانسیل بیانکننده یک سامانه میباشد. یکی از روشهای بیان و درک یک سامانه کنترلی نمایش آن با استفاده از نمودار بلوکی است که در آن رابطه بین ورودیها و خروجیها و همچنین توابع تبدیل به صورت دیداری بیان میشود.
ابزار و روشهای کنترلی که ابتدا از مهندسی و ریاضیات بدست آمدند، بهمرور کاربردهای نوینی در عرصههای پیچیدهتر مانند علوم اجتماعی و در زمینههایی ازآن نظیر روانشناسی و جامعهشناسی هم پیدا کردهاند.
تعریف

منظور از کنترل یک پدیده، دخالت در رفتار آن است، بهطوریکه، نتایج مطلوب حاصل گردد. این عمل بدین صورت انجام میگردد:
مقدار مورد نظر برای یک سیستم یا همان مقدار مطلوب به عنوان مرجع در نظر گرفته میشود. هنگامیکه یک یا چند تا از خروجیهای سیستم باید برای رسیدن به مقدار مطلوب عمل نمایند، کنترلر با دستکاری ورودیها سیستم را ناچار به رسیدن به مقدار مطلوب مینماید.[2]
تاریخچه
اگرچه انواع مختلف سیستم های کنترلی به دوران باستان برمی گردند ، اما تحلیل رسمی تر این زمینه با تجزیه و تحلیل دینامیکی گاورنر گریز از مرکز ، که توسط فیزیکدان جیمز کلرک مکسول در سال ۱۸۶۸، با عنوان درباره گاورنر انجام شد ، آغاز شد. قبلاً از یک گاورنر گریز از مرکز برای تنظیم سرعت آسیاب های بادی استفاده شده بود. ماکسول پدیده خود نوسان را توصیف و تحلیل کرد ، که در آن تأخیر در سیستم ممکن است منجر به جبران بیش از حد و رفتار ناپایدار شود. این موضوع باعث ایجاد علاقه شدیدی به این موضوع شد ،که در طی آن ، همکلاسی ماکسول ، ادوارد جان روت ، نتایج ماکسول را به صورت انتزاعی برای کلاس عمومی سیستم های خطی خلاصه کرد. به طور مستقل ، آدولف هرویتس با استفاده از معادلات دیفرانسیل در سال ۱۸۷۷ پایداری سیستم را تجزیه و تحلیل کرد و نتیجه آن چیزی بود که اکنون به عنوان قضیه روت-هرویتس شناخته می شود.
یک کاربرد قابل توجه کنترل پویا در منطقه پرواز با سرنشین بود. برادران رایت اولین پروازهای آزمایشی موفقیت آمیز خود را در ۱۷ دسامبر ۱۹۰۳ انجام دادند و از نظر توانایی کنترل پروازهای خود برای دوره های قابل توجهی متمایز بودند (بیشتر از توانایی تولید بالابر از یک ایرفویل که شناخته شده بود). کنترل مداوم و مطمئن هواپیما برای پروازهایی که بیش از چند ثانیه طول بکشد ، ضروری بود.
با جنگ جهانی دوم، نظریه کنترل در حال تبدیل شدن به یک حوزه مهم تحقیق بود. Irmgard Flügge-Lotz نظریه سیستم های کنترل خودکار ناپیوسته را توسعه داد و اصل انفجار را در توسعه تجهیزات کنترل پرواز خودکار برای هواپیماها اعمال کرد. سایر زمینه های کاربرد برای کنترل های ناپیوسته شامل سیستم های کنترل آتش ، سیستم های هدایت و الکترونیک بود. گاهی اوقات، از روشهای مکانیکی برای بهبود پایداری سیستم ها استفاده می شود. به عنوان مثال ، تثبیت کننده های کشتی باله هایی هستند که در زیر خط آب نصب شده و به صورت جانبی ظاهر می شوند. در شناورهای معاصر ، آنها ممکن است باله های فعال کنترل ژیروسکوپی باشند ، که توانایی تغییر زاویه حمله خود را دارند تا بتوانند غلبه بر غلتک ناشی از باد یا امواج وارد بر کشتی را تغییر دهند.
مسابقه فضایی نیز به کنترل دقیق فضاپیما بستگی داشت و نظریه کنترل همچنین شاهد استفاده فزاینده ای در زمینه هایی مانند اقتصاد و هوش مصنوعی بوده است. در اینجا ، ممکن است بگویید که هدف یافتن یک مدل داخلی است که از قضیه تنظیم کننده خوب پیروی کند. بنابراین ، به عنوان مثال ، در اقتصاد ، هرچه مدل تجارت (سهام یا کالاها) با دقت بیشتری نشان دهنده عملکرد بازار باشد ، با سهولت بیشتری می تواند آن بازار را کنترل کند و "کار مفید" (سود) را از آن استخراج کند. در هوش مصنوعی ، یک مثال ممکن است یک چپ بات باشد که حالت گفتمان انسانها را مدلسازی می کند: هرچه با دقت بیشتری بتواند حالت انسانی را مدل سازی کند (مثلاً در یک خط تلفن پشتیبانی صوتی تلفنی) ، بهتر می تواند وظایف انسان را با مهارت انجام دهد (به عنوان مثال در انجام اقدامات اصلاحی برای حل مشکلی که باعث تماس تلفنی با خط راهنما شده است). این دو نمونه آخر ، تفسیر تاریخی محدود تئوری کنترل را به عنوان مجموعه ای از معادلات دیفرانسیل مدل سازی و تنظیم حرکت جنبشی در نظر گرفته و آن را به یک تعمیم گسترده تنظیم کننده متقابل با گیاه گسترش می دهد.
نظریه کنترل خطی و غیرخطی
رشته نظریه کنترل را می توان به دو شاخه تقسیم کرد:
- تئوری کنترل خطی - این مربوط به سیستم های ساخته شده از دستگاه هایی است که از اصل سوپرپوزیشن پیروی می کنند ، یعنی تقریباً متناسب بودن خروجی با ورودی. آنها تابع معادلات دیفرانسیل خطی هستند. یک زیر کلاس اصلی سیستم هایی است که علاوه بر اینها دارای پارامترهایی هستند که با گذشت زمان تغییر نمیکنند ،که سیستم های ثابت زمان خطی (LTI) نامیده می شوند. این سیستم ها قابل قبول تکنیک های ریاضی با دامنه فرکانس قدرتمند با عمومیت زیاد ، مانند تبدیل لاپلاس ، تبدیل فوریه ، تبدیل Z ، نمودار Bode ، منبع ریشه و معیار پایداری Nyquist هستند. اینها منجر به توصیف سیستم با استفاده از اصطلاحاتی مانند پهنای باند ، پاسخ فرکانس ، مقادیر ویژه ، افزایش ، فرکانس های تشدید ، صفر و قطب می شوند ، که راه حل هایی برای پاسخگویی سیستم و تکنیک های طراحی برای اکثر سیستم های مورد نظر ارائه می دهند.
- نظریه کنترل غیرخطی - این طبقه گسترده تری از سیستم ها را شامل می شود که از اصل سوپرپوزیشن پیروی نمیکنند و برای سیستم های واقعی تر اعمال می شود زیرا تمام سیستم های کنترل واقعی غیرخطی هستند. این سیستم ها اغلب توسط معادلات دیفرانسیل غیرخطی اداره می شوند. تعداد کمی از تکنیک های ریاضیاتی که برای کنترل آنها تولید شده است دشوارتر و بسیار کلی تر هستند ، که اغلب فقط در دسته های کمی از سیستم ها اعمال می شوند. اینها شامل تئوری چرخه حد ، نقشه های پوانکره ، قضیه پایداری لیاپونوف و توصیف توابع است. سیستم های غیرخطی اغلب با استفاده از روش های عددی در رایانه ، به عنوان مثال با شبیه سازی عملکرد آنها با استفاده از یک زبان شبیه سازی ، تجزیه و تحلیل می شوند. اگر فقط راه حلهای نزدیک به یک نقطه پایدار مورد توجه باشد ، سیستمهای غیرخطی را می توان با تقریب آنها با یک سیستم خطی با استفاده از تئوری اغتشاش خطی کرد و از تکنیکهای خطی استفاده کرد.
رابط سیستم - SISO و MIMO
سیستم های کنترل را می توان به تعداد ورودی و خروجی به دسته های مختلف تقسیم کرد.
- تک خروجی تک ورودی (SISO) - این ساده ترین و متداول ترین نوع است که در آن یک خروجی توسط یک سیگنال کنترل کنترل می شود. به عنوان مثال می توان به کنترل کروز ، یا سیستم صوتی اشاره کرد که در آن ورودی کنترل سیگنال صوتی ورودی و خروجی امواج صوتی بلندگو است.
- چند خروجی چند ورودی (MIMO) - این موارد در سیستم های پیچیده تری یافت می شوند. به عنوان مثال ، تلسکوپ های بزرگ مدرن مانند Keck و MMT دارای آینه های متشکل از بخشهای جداگانه هستند که هر کدام توسط یک محرک کنترل می شوند. شکل کل آینه به طور مداوم توسط سیستم کنترل نوری فعال MIMO با استفاده از ورودی از چندین سنسور در صفحه کانونی تنظیم می شود ، تا بتواند تغییرات شکل آینه را به دلیل انبساط حرارتی ، انقباض ، تنش هنگام چرخش و تحریف تغییر دهد جبهه موج به دلیل تلاطم جو. سیستم های پیچیده مانند رآکتورهای هسته ای و سلول های انسانی توسط کامپیوتر به عنوان سیستم های کنترل بزرگ MIMO شبیه سازی می شوند.
سیستم کنترل پسخوردی
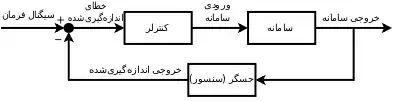
سیستم کنترل پسخوردی (feedback control system) سیستمی است که از راه مقایسه خروجی و ورودی مبنا و با استفاده از اختلاف آنها به عنوان وسیله کنترل، رابطه از پیش تعیین شده میان خروجی و ورودی را حفظ میکند.
سیستمهای کنترل پسخوردی به حوزه مهندسی (الکترونیک) محدود نمیشوند و چنین سیستمهایی را میتوان در حوزههای دیگر نظیر اقتصاد و زیستشناسی نیز یافت.
علت استفاده از پسخورد در سامانههای کنترل، کاهش خطای میان ورودی مبنا و خروجی است. کاهش خطای سیستم، تنها یکی از آثار بسیار مهمی است که پسخورد بر یک سامانه دارد. پسخورد بر سایر مشخصات عملکرد سیستم مانند پایداری، پهنای باند، بهرهٔ کل، امپدانس و حساسیت نیز اثر دارد.
جستارهای وابسته
- نظریه کنترل
- سامانه کنترل حلقه بسته
- سامانه کنترل حلقهباز
- سامانه تنظیمکننده خودکار
- سامانه کنترل
- خودکارسازی
- کنترل فرایندها
- سروومکانیسم
- توابع شعاعی پایه
- مهندسی کنترل
- کنترل هوشمند
- نظریهٔ ریاضی سیستمها
- نظریهٔ سیستمها
- کنترلگرها
پانوشتهها
- Maxwell, J.C. (1868). "On Governors". Proceedings of the Royal Society of London. 16: 270–283. doi:10.1098/rspl.1867.0055. JSTOR 112510.
- نظریهٔ ریاضی کنترل
منابع
- کتاب کنترل، تألیف کاتسو هیکو اگاتا ترجمه علی کافی چاپ مرکز نشر دانشگاهی
- کتاب سیستمهای کنترل، تألیف بنجامین کو ترجمه علی کافی چاپ مؤسسه انتشارات علمی دانشگاه صنعتی شریف
- Smith, O. J. M. , Feedback Control Systems, New York, N.Y. : McGraw-Hill Book Company, Inc. , 1958.
- نظریهٔ ریاضی کنترل بایگانیشده در ۲۰۰۸-۱۰-۳۱ توسط Wayback Machine (انگلیسی)
- نظامالدین فقیه، سیستمهای پویا: اصول و تعیین هویت ۹۶۴-۴۵۹-۸۰۶-۷:شابک[1][2]
- نظامالدین فقیه، سیستمهای کنترل ۹۶۴-۵۹۵۷-۶۰-۵:شابک[3][4]
- نظامالدین فقیه، مبانی شبیهسازی سیستمها ۹۶۴-۶۸۱۰-۰۶-۳:شابک[5][6]
- نظامالدین فقیه، کنترل هوشمند مواد با کنترلکنندههای فازی ۹۷۸-۹۶۴-۹۹۹۸-۲۴-۴:شابک[7]
پانویس
پیوند به بیرون
| در ویکیانبار پروندههایی دربارهٔ نظریه کنترل موجود است. |
- نظریهٔ مدرن کنترل (انگلیسی)
| ردههای سامانهها |
|
|---|---|
| سامانهها |
|
| زمینههای نظری |
|
| دانشمندان سامانهها |
|
| |
| بنیانها |
|
|---|---|
| جبر | |
| آنالیز | |
| گسسته |
|
| هندسه | |
| نظریه اعداد |
|
| توپولوژی | |
| کاربردی | |
| محاسباتی | |
| سایر |
|
| |
Note: This template roughly follows the 2012 ACM Computing Classification System. | |
| سختافزار | |
| سازمان سامانههای رایانه |
|
| شبکه رایانهای | |
| سازمان نرمافزار | |
| نظریه زبانهای برنامهنویسی و ابزار توسعه نرمافزار | |
| توسعه نرمافزار | |
| نظریه محاسبات | |
| الگوریتمها | |
| ریاضیات رایانه | |
| سامانه اطلاعاتی | |
| امنیت رایانه | |
| تعامل انسان و رایانه | |
| همروندی | |
| هوش مصنوعی | |
| یادگیری ماشین | |
| گرافیک رایانهای | |
| رایانش کاربردی | |
توجه: بنا بر سامانه ردهبندی رایانش ایسیام علم رایانه همچنین میتواند به موضوعها یا زمینههای گوناگون تقسیم شود.
| |